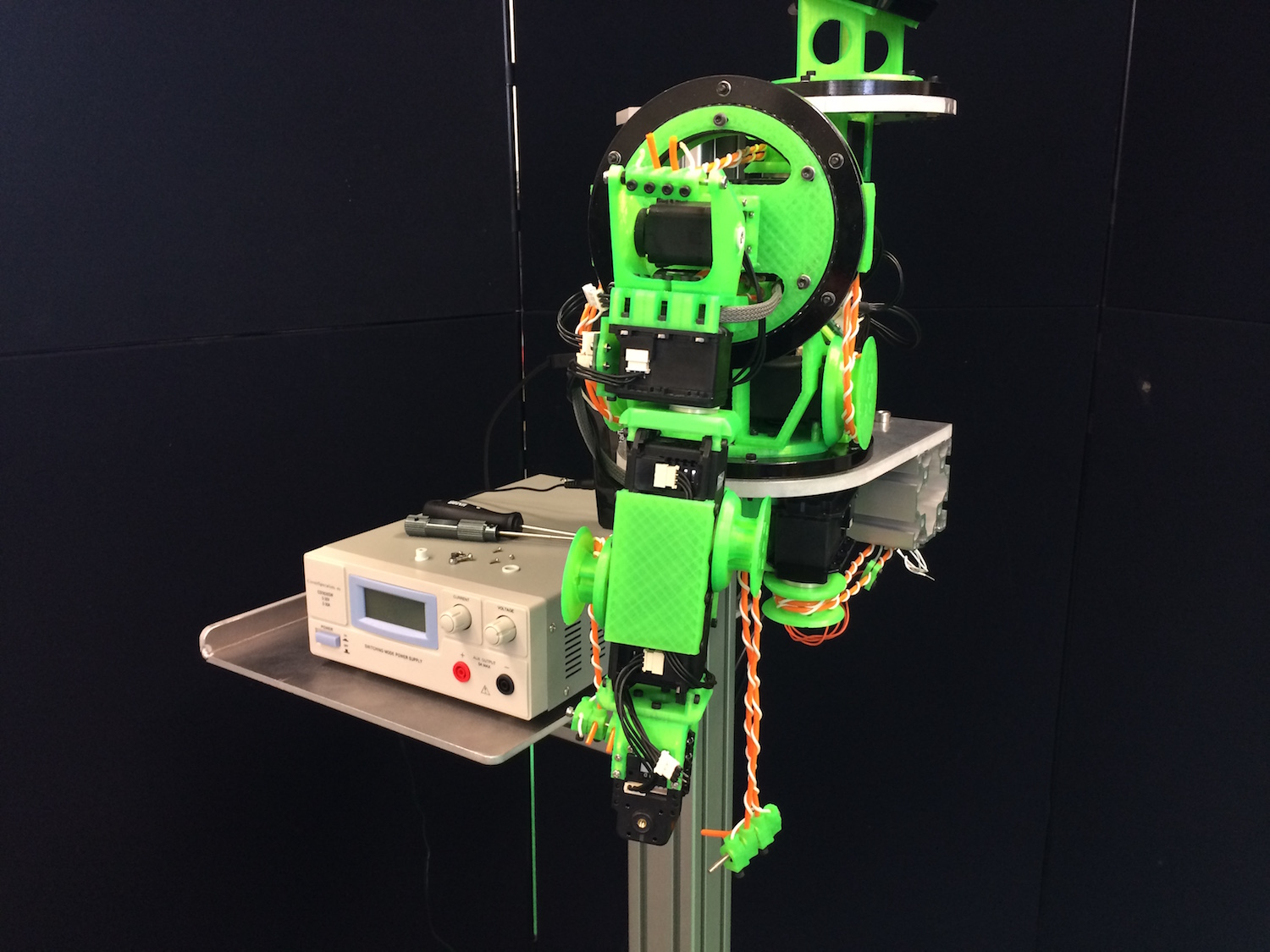
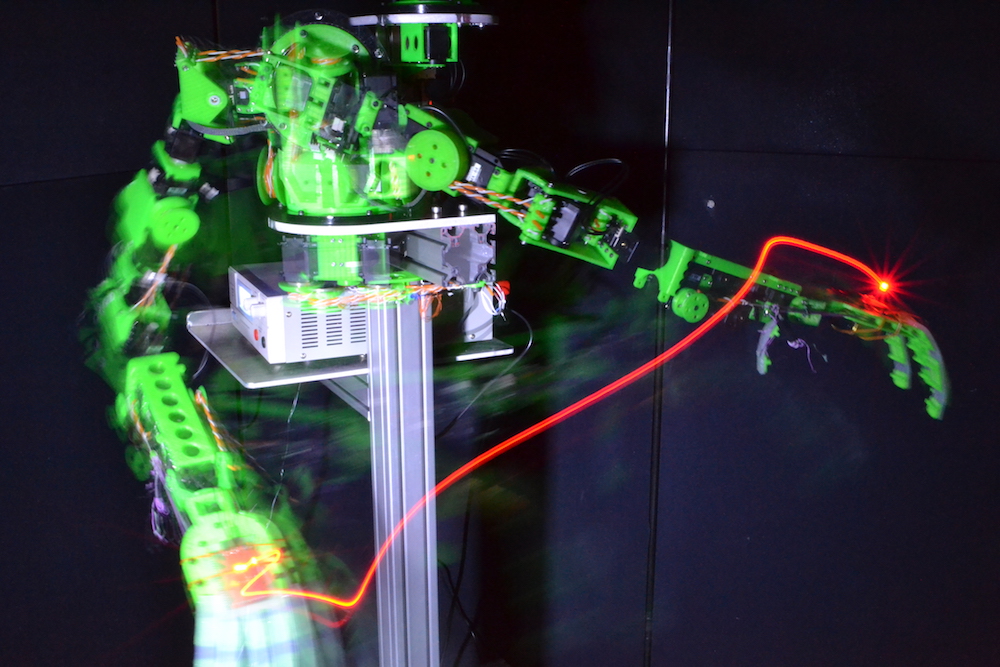
The GummiArm is an open source robotic arm inititally developed as part of the DeCoRo project at Plymouth University, Plymouth, UK.
The platform is largely built with 3D printed plastic parts, which means you can easily modify and repair it. It also affords replication of e.g. research experiments on cognitive robotics, or tutorials/practicals for secondary and higher education.
The project is based on concurrent development of software and hardware, and is open to the community so everyone can build their own platform, extend the design, share the software and exchange baselines, see https://mstoelen.github.io/GummiArm/
Alternatively, you can purchase a ready-built GummiArm, then use it as is, or extend upon it freely, even use it as part of your commercial platform.